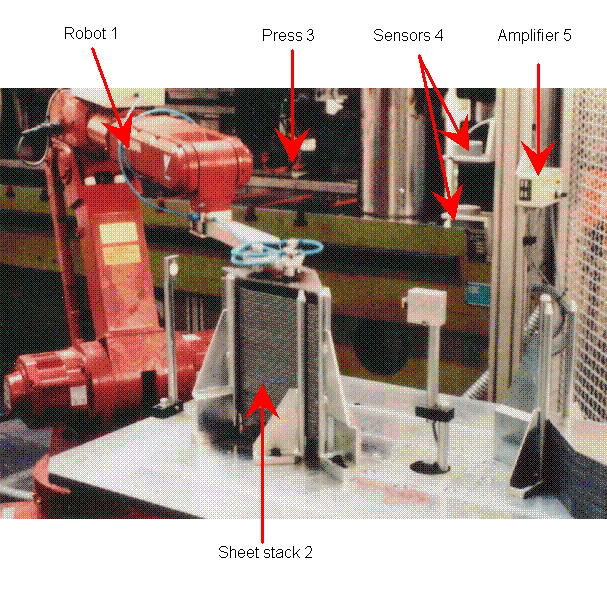
The robot 1 destacks steel blanks 2 and feed
them into press 3. The robot vacuum gripper cups moves the blank so that it passes
touchless between both double sheet sensors 4.If the sensors detect double sheets a
contact in amplifier 5 switches. This contact gives the robot the command to store the
sheet in a double sheet bin.