| 
|
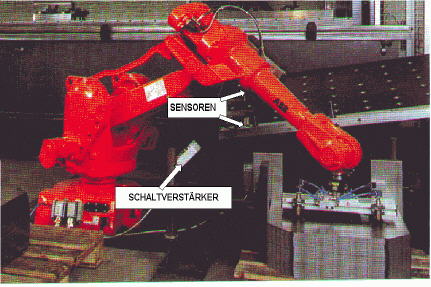
Der Roboter stapelt Blechzuschnitte ab und
übergibt sie zur Weiterverarbeitung an eine Biegemaschine. Beim Abstapeln führt er die
Bleche zwischen 2 einander gegenüberliegend montierte Doppelblech- Sensoren
berührungs- und rückwirkungsfrei hindurch. Hat der Greifer Doppelbleche erfaßt, so
schaltet ein Schaltkontakt des Doppelblech- Schaltverstärkers. Diese Schaltinformation
veranlaßt den Roboter den Ladevorgang (evt. auch mehrmals) zu wiederholen, um
dabei das Doppelblech evt. abzuschütteln.Bei jedem neuen Ladeversuch führt der
Roboter erneut das Blech zwischen die Sensoren. Sind mehrere Ladeversuche erfolglos d.h.
das Doppelblech nicht abzuschütteln, so legt der Roboter die Doppelbleche auf einem
Doppelblechstapel ab.
|