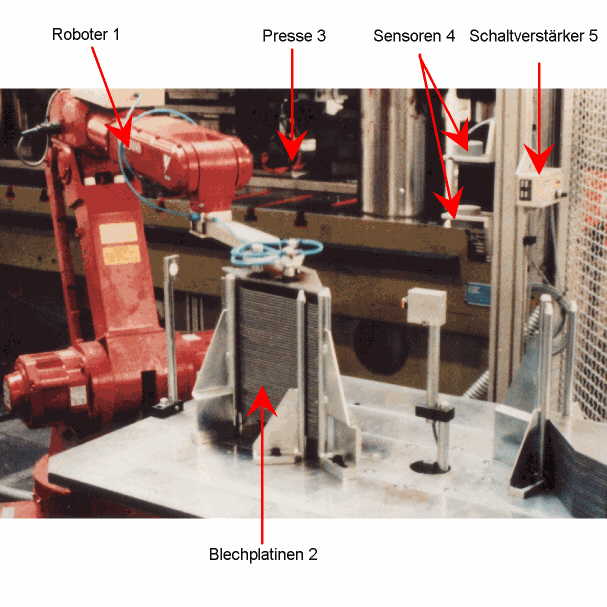
Der Roboter 1 stapelt Blechplatinen 2 ab und
führt sie der Presse 3 zu. Dabei führt er die Platinen zwischen den beiden Doppelblech-
Sensoren 4 berührungslos hindurch. Detektieren die Sensoren 4 Doppelblech, so schaltet im
Schaltverstärker 5 ein Ausgabekontakt. Über diesen Ausgabekontakt wird der Roboter so
gesteuert, dass er die Doppellbeche in einer separaten Ablage deponiert.